神经网络数学基础.Part.02
数学基础 Part 02
链式法则
复合函数
当\(u=g(x)\),\(y=f(u)\),\(y\)作为\(x\)的函数可以表示为\(y=f(g(x))\)的「复合函数」形式。
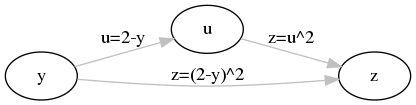
例:\(z=(2-y)^2\)是\(u=2-y\)和\(z=u^2\)的复合函数:
例:激活函数\(a(x)\)有多个输入\(x_1,x_2,x_3,\cdots,x_n\),则神经单元输出\(y\)的过程:
\[ \begin{cases} \begin{split} z &= f(x_1,x_2,x_3,\cdots,x_n)=w_1x_1+w_2x_2+w_3x_3+\cdots +w_nx_n+b \\ y &= a(z) \end{split} \end{cases} \]单变量函数的链式法则
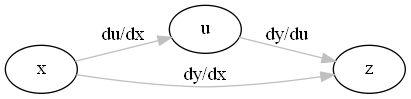
当\(u=g(x)\),\(y=f(u)\)时,复合函数\(y=f(g(x))\)的导数可以使用以下「复合函数求导公式」 也叫「链式法则」:
\[ \begin{equation} \frac{{\rm d}y}{{\rm d}x}=\frac{{\rm d}y}{{\rm d}u}\frac{{\rm d}u}{{\rm d}x} \end{equation} \label{rpc_chnfp} \]
公式\(\ref{rpc_chnfp}\)当作分数来看,右边约分去掉\(\rm{d}u\)也等于左边。 (注:这个约分方法不适用于\(\rm{d}x\)、\(\rm{d}y\)平方地场景)
例:\(y=f(u)\),\(u=f(v)\),\(v=f(x)\)时,求导:
\[ \begin{equation} \frac{{\rm d}y}{{\rm d}x}=\frac{{\rm d}y}{{\rm d}u}\frac{{\rm d}u}{{\rm d}v}\frac{{\rm d}v}{{\rm d}x} \end{equation} \label{rpc_chnfp2} \]例:对于以下\(x\)的函数求导:
\[ \frac{1}{1 + {\rm e}^{-(wx+b)}} \quad w \text{、} b \text{为常数} \]解:设\(wx+b=u\),可以得到:
\[ \frac{1}{1 + {\rm e}^{-u}} \quad \text{,} u=wx+b \]前一部分是Sigmoid函数,之前已经求过Sigmoid函数的导函数:
\[ \frac{{\rm d}y}{{\rm d}u} = y(1-y) \]再代入\(\frac{{\rm d}u}{{\rm d}x}=w\),得到:
\[ \begin{equation} \begin{split} \frac{{\rm d}x}{{\rm d}u} &= \frac{{\rm d}y}{{\rm d}u}\frac{{\rm d}u}{{\rm d}x} \\ &= y(1-y) \cdot w \\ &= \frac{1}{1+{\rm e}^{(wx+b)}} \Big(1 - \frac{1}{1+{\rm e}^{(wx+b)}}\Big) \cdot w \\ &= \frac{w}{1+{\rm e}^{(wx+b)}} \Big(1 - \frac{1}{1+{\rm e}^{(wx+b)}}\Big) \end{split} \end{equation} \]多变量函数的链式法则
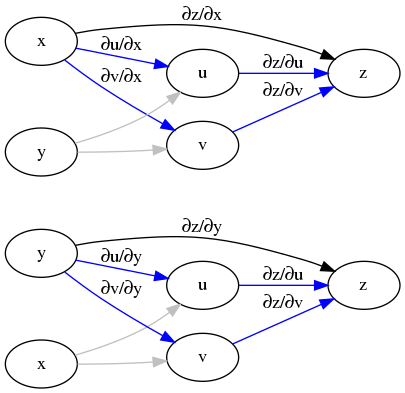
对于函数\(z(u,v)\),\(u(x,y)\),\(v(x,y)\),求导:
\[ \begin{equation} \frac{\partial z}{\partial x}= \frac{\partial z}{\partial u} \frac{\partial u}{\partial x} + \frac{\partial z}{\partial v} \frac{\partial v}{\partial x} \quad , \quad \frac{\partial z}{\partial y}= \frac{\partial z}{\partial u} \frac{\partial u}{\partial y} + \frac{\partial z}{\partial v} \frac{\partial v}{\partial y} \end{equation} \label{rpc_mmcpcf} \]
例,\(C=u^2+v^2\),\(u=ax+by\),\(v=px+qy\),(\(a,b,q,p\)为常数)时,导数为:
\[ \begin{split} \frac{\partial C}{\partial x} &= \frac{\partial C}{\partial u} \frac{\partial u}{\partial x} + \frac{\partial C}{\partial v} \frac{\partial v}{\partial x} & = 2u \times a + 2v \times p \\ & &= 2(ax+by) \times a + 2(px+qy) \times p \\ & &= 2a(ax+by) + 2p(px+qy) \\ \frac{\partial C}{\partial y} &= \frac{\partial C}{\partial u} \frac{\partial u}{\partial y} + \frac{\partial C}{\partial v} \frac{\partial v}{\partial y} & = 2u \times b + 2v \times q \\ & &= 2(ax+by) \times b + 2(px+qy) \times q \\ & &= 2b(ax+by) + 2q(px+qy) \\ \end{split} \]还可以扩展到更多变量的情况下,例如当\(a1,b1,c1,a2,b2,c2,a3,b3,c3\)为常数时:
\[ \begin{cases} \begin{split} C &= u^2 + v^2 + w^2 \\ u &= a_1x + b_1y + c_1z \\ v &= a_2x + b_2y + c_2z \\ w &= a_2x + b_2y + c_2z \end{split} \end{cases} \]上面式子的导数为:
\[ \begin{split} \frac{\partial C}{\partial x} & = \frac{\partial C}{\partial u} \frac{\partial u}{\partial x} + \frac{\partial C}{\partial v} \frac{\partial v}{\partial x} + \frac{\partial C}{\partial w} \frac{\partial w}{\partial x} \\ & = 2u \times a_1 + 2v \times a_2 + 2w \times a_3 \\ & = 2(a_1x+a_1y+a_1z) \times a_1 + 2(a_2x+a_2y+a_2z) \times a_2 + 2(a_3x+a_3y+a_3z) \times a_3 \\ & = 2a_1(a_1x+a_1y+a_1z) + 2a_2(a_2x+a_2y+a_2z) + 2a_3(a_3x+a_3y+a_3z) \\ & \\ \frac{\partial C}{\partial y} & = \frac{\partial C}{\partial u} \frac{\partial u}{\partial y} + \frac{\partial C}{\partial v} \frac{\partial v}{\partial y} + \frac{\partial C}{\partial w} \frac{\partial w}{\partial y} \\ & = 2u \times b_1 + 2v \times b_2 + 2w \times b_3 \\ & = 2(a_1x+a_1y+a_1z) \times b_1 + 2(a_2x+a_2y+a_2z) \times b_2 + 2(a_3x+a_3y+a_3z) \times b_3 \\ & = 2b_1(a_1x+a_1y+a_1z) + 2b_2(a_2x+a_2y+a_2z) + 2b_3(a_3x+a_3y+a_3z) \\ & \\ \frac{\partial C}{\partial z} & = \frac{\partial C}{\partial u} \frac{\partial u}{\partial z} + \frac{\partial C}{\partial v} \frac{\partial v}{\partial z} + \frac{\partial C}{\partial w} \frac{\partial w}{\partial z} \\ & = 2u \times c_1 + 2v \times c_2 + 2w \times c_3 \\ & = 2(a_1x+a_1y+a_1z) \times c_1 + 2(a_2x+a_2y+a_2z) \times c_2 + 2(a_3x+a_3y+a_3z) \times c_3 \\ & = 2c_1(a_1x+a_1y+a_1z) + 2c_2(a_2x+a_2y+a_2z) + 2c_3(a_3x+a_3y+a_3z) \\ \end{split} \]函数的近似公式
多变量函数的近似公式是实现梯度下降的工具。
单变量函数的近似公式
在求导的定义中,\(\Delta x\)是趋近于「无限小」:
\[ f'(x) = \lim_{\Delta x \to 0} \frac{f(x + \Delta x) - f(x)}{\Delta x} \]如果把「无限小」换成「非常微小」,也不会带来很大的误差,从而得到 :
\[ \begin{equation} f'(x) \fallingdotseq \frac{f(x + \Delta x) - f(x)}{\Delta x} \end{equation} \label{pf_lmll} \]进一步变形为「单变量函数的近似公式」:
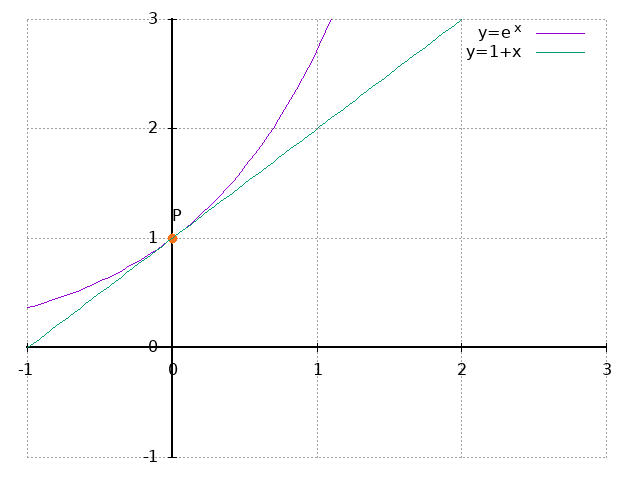
\[ \begin{equation} \begin{split} f'(x) & \fallingdotseq \frac{f(x + \Delta x) - f(x)}{\Delta x} \\ f'(x) \cdot \Delta x & \fallingdotseq f(x + \Delta x) - f(x) \\ f'(x) \cdot \Delta x + f(x) & \fallingdotseq f(x + \Delta x) \\ f(x + \Delta x) & \fallingdotseq f(x) + f'(x)\Delta x \\ \end{split} \end{equation} \label{pf_lmll2} \]例,\(f(x)=e^x\)在\(x=0\)时的近似公式:
\[ e^{x + \Delta x} \fallingdotseq e^x + e^x\Delta x \]当\(x=0\)时,把\(\Delta x\)替换为\(x\):
\[ e^{x} \fallingdotseq 1 + x \]从图像上看,\(f(x)=e^x\)与\(f(x)=1+x\)在\((0,1)\)处重叠:
多变量函数的近似公式
把近似公式扩展到多变量环境下:
\[ \begin{equation} f(x+\Delta x,y+\Delta y) \fallingdotseq f(x,y) + \frac{\partial f(x,y)}{\partial x}\Delta x + \frac{\partial f(x,y)}{\partial y}\Delta y \end{equation} \label{pf_lmml} \]例,\(z=e^{x+y}\)时,求\(x=y=0\)附近的近似公式:
根据指数函数的求导公式:
\[ \frac{\partial z}{\partial x}=\frac{\partial z}{\partial y}=e^{x+y} \]与近似值公式结合,得到:
\[ e^{x+\Delta x+y+\Delta y} \fallingdotseq e^{x+y} +e^{x+y}\Delta x + e^{x+y}\Delta y \]当\(x=y=0\)时,把\(\Delta x\)替换为\(x\),\(\Delta y\)替换为\(y\):
\[ e^{x+y} \fallingdotseq 1+x+y \]公式\(\ref{pf_lmml}\)可以进一步简化,首先定义\(\Delta z\),用于表示当\(x\)、\(y\) 依次变化\(\Delta x\)、\(\Delta y\)时函数\(z=f(x,y)\)的变化:
\[ \begin{equation} \Delta z = f(x+\Delta x,y+\Delta y) - f(x,y) \end{equation} \label{pf_lmml2} \]然后公式\(\ref{pf_lmml}\)就可以简化为:
\[ \begin{split} f(x+\Delta x,y+\Delta y) & \fallingdotseq f(x,y) + \frac{\partial f(x,y)}{\partial x}\Delta x + \frac{\partial f(x,y)}{\partial y}\Delta y \\ f(x+\Delta x,y+\Delta y) - f(x,y) & \fallingdotseq \frac{\partial f(x,y)}{\partial x}\Delta x + \frac{\partial f(x,y)}{\partial y}\Delta y \\ \Delta z & \fallingdotseq \frac{\partial z}{\partial x}\Delta x + \frac{\partial z}{\partial y}\Delta y \end{split} \label{pf_lmml3} \]当需要扩展到更多变量时:
\[ \begin{equation} \Delta z \fallingdotseq \frac{\partial z}{\partial x}\Delta x + \frac{\partial z}{\partial y}\Delta y + \frac{\partial z}{\partial w}\Delta w \end{equation} \label{pf_lmml5} \]近似公式的向量表示
近似公式\(\ref{pf_lmml5}\)可以写成以两个向量内积的形式
\[ \begin{equation} \begin{split} \Delta z & \fallingdotseq \frac{\partial z}{\partial x}\Delta x + \frac{\partial z}{\partial y}\Delta y + \frac{\partial z}{\partial w}\Delta w \\ & \fallingdotseq \Big( \frac{\partial z}{\partial x} , \frac{\partial z}{\partial y} , \frac{\partial z}{\partial w}\Big) \cdot (\Delta x , \Delta y , \Delta z) \\ \end{split} \end{equation} \label{pf_lmml5b} \]如果变量变得非常多,那么\(\ref{pf_lmml5b}\)这个公式会写得非常长。 为了表达简单我们把这两个变量分别起两个缩写名字:\(\nabla z\)和\(\Delta x\), (\(\nabla\)读作nabla):
\[ \begin{equation} \begin{split} \nabla z &= \Big( \frac{\partial z}{\partial x} , \frac{\partial z}{\partial y} , \frac{\partial z}{\partial z}\Big) \\ \Delta x &= (\Delta x , \Delta y , \Delta z) \end{split} \end{equation} \label{pf_lmml5c} \]这样再长的公式\(\ref{pf_lmml5b}\)也只要写成:
\[ \begin{equation} \Delta z = \nabla z \times \Delta x \end{equation} \label{pf_lmml6} \]泰勒展开式
「泰勒展开式」是近似公式一般化的公式:
\[ \begin{equation} \label{pf_lmmtl} \begin{split} & f(x + \Delta x, y + \Delta y) \\ = & f(x,y) + \frac{\partial f}{\partial x} \Delta x + \frac{\partial f}{\partial y} \Delta y + \\ & \frac{1}{2!} \bigg \{ \frac{\partial ^2 f}{\partial x^2}(\Delta x)^2 + 2\frac{\partial ^2 f}{\partial x\partial y}\Delta x \Delta y + \frac{\partial ^2 f}{\partial y^2}(\Delta y)^2 \bigg \} + \\ & \frac{1}{3!} \bigg \{ \frac{\partial ^3 f}{\partial x^3}(\Delta x)^3 + 3\frac{\partial ^3 f}{\partial x^2\partial y}(\Delta x)^2 \Delta y + 3\frac{\partial ^3 f}{\partial x\partial y^2}\Delta x (\Delta y)^2 + \frac{\partial ^3 f}{\partial y^3}(\Delta y)^3 \bigg \} + \\ & \cdots \end{split} \end{equation} \]从以上泰勒展开式中取出前三项,就得到多变量函数的近似公式\(\ref{pf_lmml}\)。
此外,我们约定:
\[ \frac{\partial ^2 f}{\partial x^2}=\frac{\partial}{\partial x}\frac{\partial f}{\partial x} , \quad \frac{\partial ^2 f}{\partial x \partial y}=\frac{\partial}{\partial x}\frac{\partial f}{\partial y} , \quad \cdots \]梯度下降法
「梯度下降」法是用来寻找函数最小值的点的方法,同时也是神经网络要用到的重要工具。
目前我们只在函数充分光滑的前题下,讨论梯度下降法。
通过公式求最小值
对于一元函数\(y=f(x)\)要找最小值,那么\(f'(x)=0\)是满足最小值的必要条件。
那么对于二元函数\(z=f(x,y)\)的最小值,那么\(x\)与\(y\)取偏导都为\(0\)也是必要条件:
\[ \begin{equation} \frac{\partial f(x,y)}{\partial x}=0 , \quad \frac{\partial f(x,y)}{\partial y}=0 \end{equation} \label{fldl_pd2d} \]从图像上来看,最小值所在的点也是函数图像的底部:
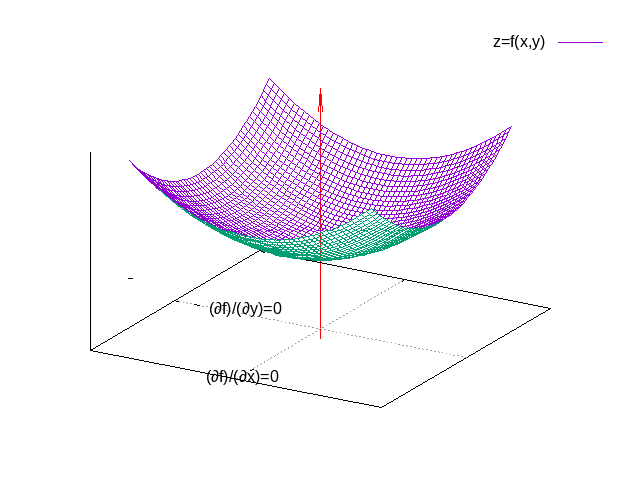
更多元的函数也是同理,分别求各个变量偏导函数值为\(0\)的点。
通过梯度下降法求最小值
但是,在实际问题中,要求得像\(\ref{fldl_pd2d}\)这样的联立方程式并不是容易的事情。 因此使用「梯度下降法」是更加现实的方案。
梯度下降法也叫「最速下降法」,模拟一个小球在重力作为下,从函数\(f(x,y)\)表面点 \(P(x,y,z)\)开始以最短路径下滑到最低点的过程。
在整个下滑的过程中的任意一个瞬间,小球所在的位置为 \(Q(x+\Delta x,y+\Delta y,z+\Delta z)\):
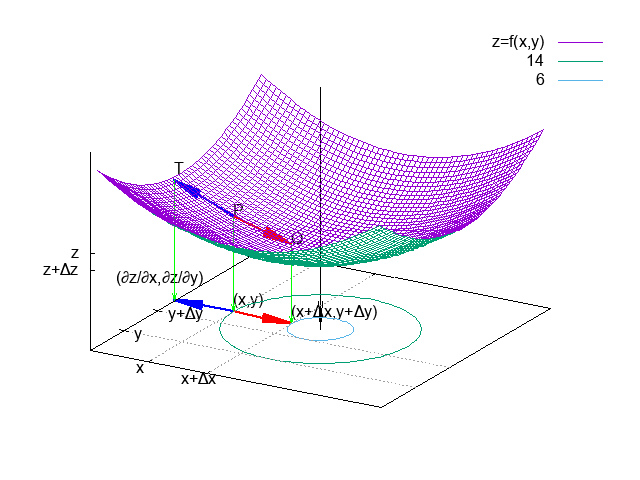
函数\(z=f(x,y)\)中,当\(x\)变动\(\Delta x\),\(y\)变动\(\Delta y\)时,函数值\(z\)的变动 \(\Delta z\):
\[ \Delta z = f(x+\Delta x, y+\Delta y)-f(x,y) \]根据近似公式,可以简化为:
\[ \Delta z = \frac{\partial f(x,y)}{\partial x}\Delta x + \frac{\partial f(x,y)}{\partial y}\Delta y \]近似公式可以用向量内积形式表示:
\[ \Bigg (\frac{\partial f(x,y)}{\partial x} , \frac{\partial f(x,y)}{\partial y}\Bigg ) \cdot (\Delta x , \Delta y) \]而根据向量内积的定义\(a \cdot b=|a||b|\cos \theta\)可以得知,当\(\theta\)为\(180^\circ\) (即\(a\)与\(b\)两个向量方向相反)时内积的值最小,也意味\(\Delta z\) 最小。用公式 来表示就是:
\[ \begin{equation} b=-k \times a \quad \quad \text{$k$为正常数} \end{equation} \label{fldl_vtabrls} \]把向量\(a\)与\(b\)的值代入\(\ref{fldl_vtabrls}\)就可以得到「梯度下降法的基本式」:
\[ \begin{equation} (\Delta x , \Delta y) = - \eta \Bigg (\frac{\partial f(x,y)}{\partial x} , \frac{\partial f(x,y)}{\partial y}\Bigg ) \quad \quad (\eta\text{为正的微小常量}) \end{equation} \label{fldl_sktl} \]- \(\eta\)表示大0的微小常数。
- 等号左边的向量\((\Delta x , \Delta y)\)称为「位移向量」。
从点\((x,y)\)向\((x+\Delta x,y+\Delta y)\)移动时,如果满足公式\(\ref{fldl_sktl}\) 那么函数\(z=f(x,y)\)下降得最快。所以如下的向量:
\[ \begin{equation} \Bigg (\frac{\partial f(x,y)}{\partial x} , \frac{\partial f(x,y)}{\partial y}\Bigg ) \end{equation} \label{fldl_skpt} \]称为函数\(f(x,y)\)在点\((x,y)\)处的梯度(gradient),它代表最陡的坡度方向。
例:函数\(z=x^2+y^2\)在点\((x,y)\)下降最快的向量\((\Delta x, \Delta y)\)。
先求偏导:
\[ \frac{\partial z}{\partial x} = 2x , \frac{\partial z}{\partial y} = 2y \]然后把偏导代入梯度下降的基本式\(\ref{fldl_sktl}\):
\[ (\Delta x , \Delta y) = - \eta \Bigg (\frac{\partial f(x,y)}{\partial x} , \frac{\partial f(x,y)}{\partial y}\Bigg ) \\ = - \eta (2x,2y) \quad \quad (\eta\text{为正的微小常量}) \]题目中要求起点的位置是\((1,2)\),得到
\[ (\Delta x , \Delta y) = - \eta (2 \times 1,2 \times 2) = - \eta (2,4) \quad \quad (\eta\text{为正的微小常量}) \]多变量函数的梯度下降
梯度下降的基本式\(\ref{fldl_sktl}\)推广到多变量的条件下:
\[ \begin{equation} (\Delta x_1 , \Delta x_2, \cdots ,\Delta x_n) = - \eta \Bigg ( \frac{\partial f}{\partial x_1} , \frac{\partial f}{\partial x_2} , \frac{\partial f}{\partial x_1} , \cdots , \frac{\partial f}{\partial x_n} \Bigg ) \quad \quad (\eta\text{为正的微小常量}) \end{equation} \label{fldl_sktlm} \]函数\(f\)在点\((x_1,x_2,\cdots,x_n)\)处的梯度:
\[ \begin{equation} \Bigg ( \frac{\partial f}{\partial x_1} , \frac{\partial f}{\partial x_2} , \frac{\partial f}{\partial x_1} , \cdots , \frac{\partial f}{\partial x_n} \Bigg ) \end{equation} \label{fldl_sktltl} \]下降最短路径是从点\((x_1,x_2,\cdots,x_n)\)移动到 \((x_1+\Delta x_1,x_2+\Delta x_2,\cdots,x_n+\Delta x_n)\)。
哈密尔顿算子\(\nabla\)
在实际应用中函数的变量个数可能有成千上万个,书写时会用到哈密尔顿算子\(\nabla\)。 用\(\nabla f\)缩写:
\[ \begin{equation} \nabla f = \Bigg ( \frac{\partial f}{\partial x_1} , \frac{\partial f}{\partial x_2} , \frac{\partial f}{\partial x_3} , \cdots , \frac{\partial f}{\partial x_n} \Bigg ) \end{equation} \label{fldl_sknabla} \]多变量梯度下降的基本式\(\ref{fldl_sktlm}\)简写为:
\[ \begin{equation} (\Delta x_1 , \Delta x_2, \cdots ,\Delta x_n) = - \eta \nabla f \quad \quad (\eta\text{为正的微小常量}) \end{equation} \label{fldl_sktlmnabla} \]例如,对于二变量函数\(f(x,y)\),梯度下降基本式简写为:
\[ (\Delta x , \Delta y) = - \eta \nabla f(x,y) \quad \quad (\eta\text{为正的微小常量}) \]例如,对于三变量函数\(f(x,y,z)\),梯度下降基本式简写为:
\[ (\Delta x , \Delta y, \Delta z) = - \eta \nabla f(x,y,z) \quad \quad (\eta\text{为正的微小常量}) \]等号左边的向量\((\Delta x , \Delta y, \Delta z)\)称为「位移向量」, 也可以简化为\(\Delta x\):
\[ \begin{equation} \Delta x = (\Delta x_1 , \Delta x_2, \cdots ,\Delta x_n) \end{equation} \label{fldl_skwl} \]多变量梯度下降的基本式\(\ref{fldl_sktlm}\)可以更进一步简写为:
\[ \begin{equation} \Delta x = - \eta \nabla f \quad \quad (\eta\text{为正的微小常量}) \quad \quad (\eta\text{为正的微小常量}) \end{equation} \label{fldl_skwllabma} \]\(\eta\)的取值
在神经网络中\(\eta\)称为「学习率」。从数学上来说,\(\eta\)是一个大于0的微小常量, 但是在计算机计算时,必须确定一个合适的值。而确定值大小的方法没有明确的方法, 往往只能反复试验。
用程序演示
以函数\(z=x^2+y^2\)为例,用梯度下降法求出\(z\)为最小值时的\((x,y)\), 学习率采用\(\eta=0.1\)。
首先分别对\(x,y\)求导:
\[ \begin{split} \frac{\partial z}{\partial x}=2x , \frac{\partial z}{\partial y}=2y \end{split} \]得到梯度:
\[ \begin{split} \Bigg (\frac{\partial z}{\partial x} , \frac{\partial z}{\partial y}\Bigg ) = (2x, 2y) \end{split} \]然后根据梯度下降的基本式\(\ref{fldl_sktl}\)得到位移量:
\[ \begin{split} (\Delta x_i, \Delta y_i) &=- \eta \Bigg (\frac{\partial f(x,y)}{\partial x} , \frac{\partial f(x,y)}{\partial y}\Bigg ) \\ &=- \eta (2x_i,2y_i) \\ &= (- \eta \cdot 2x_i, - \eta \cdot 2y_i) \end{split} \]下一轮的起点,用于开始新一轮的迭代:
\[ (x_{i+1},y_{i+1})=(x_i,y_i)+(\Delta x_i, \Delta y_i)=(x_i+\Delta x_i,y_i+\Delta y_i) \]一直迭代直到最小值。用代码演示如下:
scala> val eta = 0.1
scala> val func1 = (p: (Double, Double)) => Math.pow(p._1, 2) + Math.pow(p._2, 2)
scala> val funp1x = (x: Double) => 2 * x
scala> val funp1y = (y: Double) => 2 * y
scala> val start = (3.0, 2.0)
scala> def acc(lst: List[String], idx: Int, max: Int, //
| eta: Double, curr: (Double, Double)): List[String] = {
| if (idx > max) lst else {
| val px = funp1x(curr._1)
| val py = funp1y(curr._2)
| val dx = px * -1 * eta
| val dy = py * -1 * eta
| val z = func1(curr)
| val nx = curr._1 + dx
| val ny = curr._2 + dy
| val node = (curr, (px, py), (dx, dy), z, (nx, ny))
| val str = f"${idx + 1}%02d (${curr._1}%2.3f, ${curr._2}%2.3f) " +
| f"(${px}%2.3f, ${py}%2.3f) " +
| f"(${dx}%2.3f, ${dy}%2.3f) " +
| f"$z%2.3f"
| acc(str :: lst, idx + 1, max, eta, (nx, ny))
| }
| }
acc: (lst: List[String], idx: Int, max: Int, eta: Double, curr: (Double, Double))List[String]
scala> println("迭代 起点 梯度 位移量 函数值")
scala> println("idx (x,y) (∂z/∂x,∂z/∂y) (Δx,Δy) z ")
scala> println("---------------------------------------------------------")
scala> for (l <- acc(Nil, 0, 50, eta, start).reverse) println(l)
迭代 起点 梯度 位移量 函数值
idx (x,y) (∂z/∂x,∂z/∂y) (Δx,Δy) z
---------------------------------------------------------
01 (3.000, 2.000) (6.000, 4.000) (-0.600, -0.400) 13.000
02 (2.400, 1.600) (4.800, 3.200) (-0.480, -0.320) 8.320
03 (1.920, 1.280) (3.840, 2.560) (-0.384, -0.256) 5.325
04 (1.536, 1.024) (3.072, 2.048) (-0.307, -0.205) 3.408
05 (1.229, 0.819) (2.458, 1.638) (-0.246, -0.164) 2.181
06 (0.983, 0.655) (1.966, 1.311) (-0.197, -0.131) 1.396
07 (0.786, 0.524) (1.573, 1.049) (-0.157, -0.105) 0.893
08 (0.629, 0.419) (1.258, 0.839) (-0.126, -0.084) 0.572
09 (0.503, 0.336) (1.007, 0.671) (-0.101, -0.067) 0.366
10 (0.403, 0.268) (0.805, 0.537) (-0.081, -0.054) 0.234
11 (0.322, 0.215) (0.644, 0.429) (-0.064, -0.043) 0.150
12 (0.258, 0.172) (0.515, 0.344) (-0.052, -0.034) 0.096
13 (0.206, 0.137) (0.412, 0.275) (-0.041, -0.027) 0.061
14 (0.165, 0.110) (0.330, 0.220) (-0.033, -0.022) 0.039
15 (0.132, 0.088) (0.264, 0.176) (-0.026, -0.018) 0.025
16 (0.106, 0.070) (0.211, 0.141) (-0.021, -0.014) 0.016
17 (0.084, 0.056) (0.169, 0.113) (-0.017, -0.011) 0.010
18 (0.068, 0.045) (0.135, 0.090) (-0.014, -0.009) 0.007
19 (0.054, 0.036) (0.108, 0.072) (-0.011, -0.007) 0.004
20 (0.043, 0.029) (0.086, 0.058) (-0.009, -0.006) 0.003
21 (0.035, 0.023) (0.069, 0.046) (-0.007, -0.005) 0.002
22 (0.028, 0.018) (0.055, 0.037) (-0.006, -0.004) 0.001
23 (0.022, 0.015) (0.044, 0.030) (-0.004, -0.003) 0.001
24 (0.018, 0.012) (0.035, 0.024) (-0.004, -0.002) 0.000
25 (0.014, 0.009) (0.028, 0.019) (-0.003, -0.002) 0.000
26 (0.011, 0.008) (0.023, 0.015) (-0.002, -0.002) 0.000
27 (0.009, 0.006) (0.018, 0.012) (-0.002, -0.001) 0.000
28 (0.007, 0.005) (0.015, 0.010) (-0.001, -0.001) 0.000
29 (0.006, 0.004) (0.012, 0.008) (-0.001, -0.001) 0.000
30 (0.005, 0.003) (0.009, 0.006) (-0.001, -0.001) 0.000
31 (0.004, 0.002) (0.007, 0.005) (-0.001, -0.000) 0.000
32 (0.003, 0.002) (0.006, 0.004) (-0.001, -0.000) 0.000
33 (0.002, 0.002) (0.005, 0.003) (-0.000, -0.000) 0.000
34 (0.002, 0.001) (0.004, 0.003) (-0.000, -0.000) 0.000
35 (0.002, 0.001) (0.003, 0.002) (-0.000, -0.000) 0.000
36 (0.001, 0.001) (0.002, 0.002) (-0.000, -0.000) 0.000
37 (0.001, 0.001) (0.002, 0.001) (-0.000, -0.000) 0.000
38 (0.001, 0.001) (0.002, 0.001) (-0.000, -0.000) 0.000
39 (0.001, 0.000) (0.001, 0.001) (-0.000, -0.000) 0.000
40 (0.000, 0.000) (0.001, 0.001) (-0.000, -0.000) 0.000 <- min x, y, z
41 (0.000, 0.000) (0.001, 0.001) (-0.000, -0.000) 0.000
42 (0.000, 0.000) (0.001, 0.000) (-0.000, -0.000) 0.000
43 (0.000, 0.000) (0.001, 0.000) (-0.000, -0.000) 0.000
44 (0.000, 0.000) (0.000, 0.000) (-0.000, -0.000) 0.000
45 (0.000, 0.000) (0.000, 0.000) (-0.000, -0.000) 0.000
46 (0.000, 0.000) (0.000, 0.000) (-0.000, -0.000) 0.000
47 (0.000, 0.000) (0.000, 0.000) (-0.000, -0.000) 0.000
48 (0.000, 0.000) (0.000, 0.000) (-0.000, -0.000) 0.000
49 (0.000, 0.000) (0.000, 0.000) (-0.000, -0.000) 0.000
50 (0.000, 0.000) (0.000, 0.000) (-0.000, -0.000) 0.000
51 (0.000, 0.000) (0.000, 0.000) (-0.000, -0.000) 0.000
修正迭代的步长
位移量\(\Delta x\)在每次迭代的过程中并不是固定的大小,比如上面的例子里步长随着 迭代的次数越来越小。
在实际应用过程了,为了得到一个比较固定的步长,会对梯度下降的基本式\(\ref{fldl_sktl}\) 做一些修改:
\[ \begin{split} (\Delta x_i, \Delta y_i) =- \eta \Bigg (\frac{\partial f(x,y)}{\partial x} , \frac{\partial f(x,y)}{\partial y}\Bigg ) \div \sqrt{ \bigg (\frac{\partial f(x,y)}{\partial x}\bigg )^2 + \bigg (\frac{\partial f(x,y)}{\partial y}\bigg )^2 } \end{split} \]步骤如下:
迭代 | 起点 梯度 位移量 函数值
idx | (x, y, ...) (∂z/∂x,∂z/∂y,...) (Δx,Δy,...) z
------+-------------------------------------------------------------------------------
1 | (3.000000,2.000000,) (6.000000,4.000000,) (-0.284444,-0.189629,) 13.000000
2 | (2.715556,1.810371,) (5.431104,3.620748,) (-0.263966,-0.175978,) 10.651689
3 | (2.451590,1.634393,) (4.903189,3.268781,) (-0.244479,-0.162986,) 8.681533
4 | (2.207111,1.471407,) (4.414220,2.942819,) (-0.225956,-0.150637,) 7.036377
5 | (1.981155,1.320770,) (3.962306,2.641540,) (-0.208374,-0.138916,) 5.669409
6 | (1.772781,1.181854,) (3.545564,2.363700,) (-0.191711,-0.127807,) 4.539531
7 | (1.581070,1.054047,) (3.162146,2.108096,) (-0.175942,-0.117294,) 3.610798
8 | (1.405128,0.936752,) (2.810259,1.873506,) (-0.161043,-0.107362,) 2.851891
9 | (1.244085,0.829390,) (2.488170,1.658780,) (-0.146992,-0.097994,) 2.235636
10 | (1.097093,0.731396,) (2.194187,1.462794,) (-0.133764,-0.089176,) 1.738554
11 | (0.963330,0.642220,) (1.926661,1.284439,) (-0.121335,-0.080890,) 1.340451
12 | (0.841995,0.561330,) (1.683989,1.122660,) (-0.109682,-0.073122,) 1.024046
13 | (0.732312,0.488208,) (1.464624,0.976416,) (-0.098782,-0.065855,) 0.774629
14 | (0.633530,0.422354,) (1.267061,0.844708,) (-0.088610,-0.059073,) 0.579743
15 | (0.544921,0.363281,) (1.089842,0.726561,) (-0.079142,-0.052761,) 0.428911
16 | (0.465779,0.310519,) (0.931558,0.621039,) (-0.070354,-0.046903,) 0.313373
17 | (0.395425,0.263617,) (0.790850,0.527233,) (-0.062223,-0.041482,) 0.225855
18 | (0.333202,0.222134,) (0.666403,0.444269,) (-0.054725,-0.036483,) 0.160367
19 | (0.278477,0.185651,) (0.556953,0.371302,) (-0.047835,-0.031890,) 0.112016
20 | (0.230642,0.153761,) (0.461283,0.307522,) (-0.041530,-0.027686,) 0.076838
21 | (0.189112,0.126075,) (0.378224,0.252149,) (-0.035784,-0.023856,) 0.051658
22 | (0.153327,0.102218,) (0.306655,0.204436,) (-0.030575,-0.020383,) 0.033958
23 | (0.122752,0.081835,) (0.245504,0.163669,) (-0.025878,-0.017252,) 0.021765
24 | (0.096874,0.064583,) (0.193749,0.129166,) (-0.021668,-0.014445,) 0.013556
25 | (0.075207,0.050138,) (0.150413,0.100276,) (-0.017920,-0.011947,) 0.008170
26 | (0.057286,0.038191,) (0.114573,0.076382,) (-0.014611,-0.009741,) 0.004740
27 | (0.042675,0.028450,) (0.085350,0.056900,) (-0.011716,-0.007811,) 0.002631
28 | (0.030959,0.020639,) (0.061917,0.041278,) (-0.009210,-0.006140,) 0.001384
29 | (0.021749,0.014499,) (0.043498,0.028999,) (-0.007067,-0.004711,) 0.000683
30 | (0.014682,0.009788,) (0.029364,0.019576,) (-0.005263,-0.003509,) 0.000311
31 | (0.009419,0.006279,) (0.018838,0.012559,) (-0.003773,-0.002515,) 0.000128
32 | (0.005646,0.003764,) (0.011292,0.007528,) (-0.002570,-0.001713,) 0.000046
33 | (0.003076,0.002051,) (0.006152,0.004101,) (-0.001630,-0.001087,) 0.000014
34 | (0.001446,0.000964,) (0.002892,0.001928,) (-0.000925,-0.000617,) 0.000003
35 | (0.000521,0.000347,) (0.001562,0.001389,) (-0.000156,-0.000139,) 0.000000
0.000521,0.000347,
最优化问题与回归性分析
优化的主要工作就是对神经网络的参数(即权重与偏置)进行拟全,让网络的输出结果与 现实的数据相吻合。
优化问题中最浅显的例子就是「回归分析」:在多变量函数中,着眼于其中一个变量, 然后用其他变量来解释这个变量。
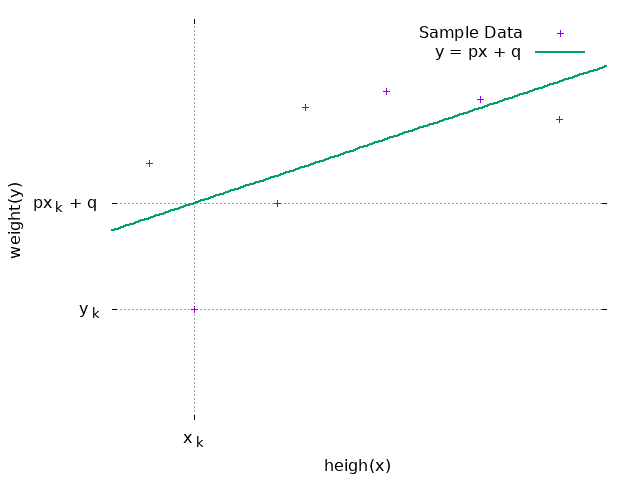
一元线性回归分析
回归分析的种类有很多,最简单有「一元线性回归分析」。
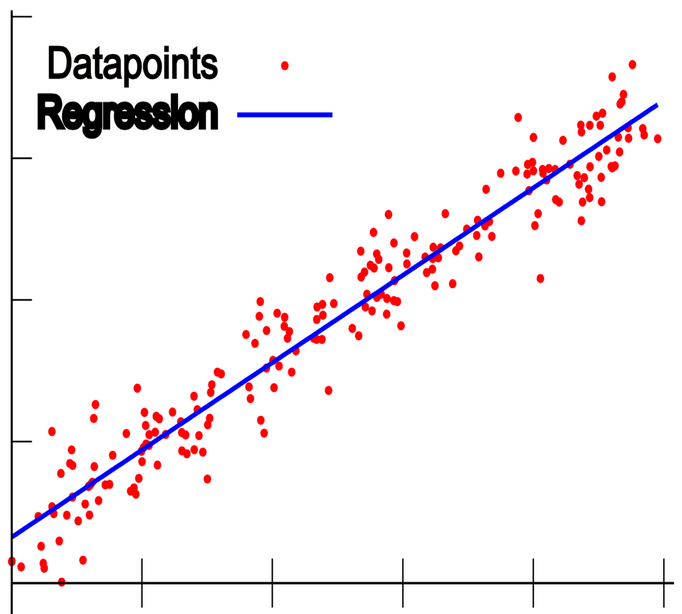
- Datapoints:离散的数据点
- Regresslon:近似地模拟离散的数据点,称为「回归直线」
多个数据点代表多个样本,从\(1\)到\(n\):
| \(x\) | \(y\) | |
|---|---|---|
| 1 | \(x_1\) | \(y_1\) |
| 2 | \(x_2\) | \(y_2\) |
| 3 | \(x_3\) | \(y_3\) |
| 4 | \(x_4\) | \(y_4\) |
| 5 | \(x_5\) | \(y_5\) |
| 6 | \(x_6\) | \(y_6\) |
| ... | ... | ... |
| n | \(x_n\) | \(y_n\) |
回归直线用公式表示:
\[ \begin{equation} y = px + q \end{equation} \label{lrt_rtsl} \]- \(p\)为常数,称为「回归系数」
- \(q\)为常数,称为「截距」
一元线性回归分析步骤
首先收集样本:
| 身高x | 体重y | |
|---|---|---|
| 学生1 | 153.3 | 45.5 |
| 学生2 | 164.9 | 56.0 |
| 学生3 | 168.1 | 55.0 |
| 学生4 | 151.5 | 52.8 |
| 学生5 | 157.8 | 55.6 |
| 学生6 | 156.7 | 50.8 |
| 学生7 | 161.1 | 56.4 |
有了样本以后,最终目标是要示出\(px+q\)的回归系数\(p\)与截距\(q\)。现在假设回归直线 已经存在:
| 身高x | 体重y | 预期值\(y=px+q\) | |
|---|---|---|---|
| 学生1 | \(153.3\) | \(45.5\) | \(153.3p+q\) |
| 学生2 | \(164.9\) | \(56.0\) | \(164.9p+q\) |
| 学生3 | \(168.1\) | \(55.0\) | \(168.1p+q\) |
| 学生4 | \(151.5\) | \(52.8\) | \(151.5p+q\) |
| 学生5 | \(157.8\) | \(55.6\) | \(157.8p+q\) |
| 学生6 | \(156.7\) | \(50.8\) | \(156.7p+q\) |
| 学生7 | \(161.1\) | \(56.4\) | \(161.1p+q\) |
对于样本中的第\(k\)位学生,实际身高为\(x_k\),实际体重为\(y_k\),体重预期值为:
\[ \begin{equation} px_k + q \end{equation} \label{lrt_evk} \]实际体重\(y_k\)与预期体重的误差记为\(e_k\):
\[ \begin{equation} e_k = y_k - (px_k + q) \end{equation} \label{lrt_eek} \]误差\(e_k\)可能是正的也可能是负的,每个样本的正确答案\(y\)与预测值\(e\) 之间误差的平方即「平方误差」\(C_k\):
\[ \begin{equation} C_k = (y_k - e_k)^2 \end{equation} \]是为了方便后续的计算,平方误差乘以系数\(\frac{1}{2}\)。 理论上换成其他的系数也不会影响结果,但是\(\frac{1}{2}\)有助于以后求导方便:
\[ \begin{equation} C_k = \frac{1}{2}(y_k - e_k)^2 \end{equation} \label{lrt_ekctp} \]把误差公式\(e_k\)在这个例子里的具体定义\ref{lrt_eek}代入平方误差公式 \ref{lrt_ekctp}后得到:
\[ \begin{equation} C_k = \frac{1}{2}(e_k)^2 = \frac{1}{2}\{y_k - (px_k + q)\}^2 \end{equation} \label{lrt_eck} \]最小二乘法与代价函数
把所有的\(K\)个平方误差加起来,就得到代价函数(cost function),记为\(C_{\rm T}\)(T表示Total) :
\[ \begin{equation} C_{\rm T} = C_1 + C_2 + C_3 + \cdots + C_K \end{equation} \]\(C_{\rm T}\)所代表的误差总和有很多的名字,如:
- 「代价函数」(Cost Function)
- 「误差函数」(Error Function)
- 「损失函数」(Lost Function)
在这里我们使用代价函数这个名字,因为其他两个名字的首字母缩写容易和神经网络中 使用的词汇「熵」(Entropy)或「层」(Layer)的首字母混淆。
代价函数不止\(C_{\rm T}\)一个,根据不同的思路代价函数还有很多种其他的形式。 这里利用平方误差总和\(C_{\rm T}\)进行最优化的方法称为「最小二乘法」。
扩展到所有的数据样本,把每个样本的平方误差加起来, 把样本数据中的每一项\(y_k\)和\(px_k+q\)都代入到公式里,得到:
\[ \begin{equation} \begin{split} C_{\rm T} = & \frac{1}{2}\{45.5 - (153.3p + q)\}^2 + \frac{1}{2}\{56.0 - (164.9p + q)\}^2 + \\ & \frac{1}{2}\{55.0 - (168.1p + q)\}^2 + \frac{1}{2}\{52.8 - (151.5p + q)\}^2 + \\ & \frac{1}{2}\{55.6 - (157.8p + q)\}^2 + \frac{1}{2}\{50.8 - (156.7p + q)\}^2 + \\ & \frac{1}{2}\{56.4 - (161.1p + q)\}^2 \end{split} \end{equation} \label{lrt_ecte} \]接下来就是要得到能使平方差最小的\(p\)与\(q\),实现的方法是之前讲的多变量函数 最小值条件:
\[ \begin{equation} \frac{\partial C_{\rm T}}{\partial p}=0, \frac{\partial C_{\rm T}}{\partial q}=0 \end{equation} \label{lrt_ecmm} \]代入数据:
\[ \begin{equation} \begin{split} \frac{\partial C_{\rm T}}{\partial p} = 0 = & - 153.3\{45.5 - (153.3p + q)\} - 164.9\{56.0 - (164.9p + q)\} \\ & - 168.1\{55.0 - (168.1p + q)\} - 151.5\{52.8 - (151.5p + q)\} \\ & - 157.8\{55.6 - (157.8p + q)\} - 156.7\{50.8 - (156.7p + q)\} \\ & - 161.1\{56.4 - (161.1p + q)\} \\ = & 113.4p + 7q - 372.1 \\ \frac{\partial C_{\rm T}}{\partial q} = 0 = & - \{45.5 - (153.3p + q)\} - \{56.0 - (164.9p + q)\} \\ & - \{55.0 - (168.1p + q)\} - \{52.8 - (151.5p + q)\} \\ & - \{55.6 - (157.8p + q)\} - \{50.8 - (156.7p + q)\} \\ & - \{56.4 - (161.1p + q)\} \\ = & 177312p + 113.4q - 59274 \end{split} \end{equation} \label{lrt_ected} \]解联立方程:
\[ \begin{equation} \begin{cases} \begin{split} 113.4p + 7q & = 372.1 \\ 177312p + 113.4q & = 59274 \end{split} \end{cases} \end{equation} \label{lrt_ectedll} \]得到:
\[ \begin{equation} p = 0.41 , q = -12.06 \end{equation} \label{lrt_ectedrs} \]这里\(C_{\rm T}=27.86\)为最小值。把得到的\(p\)和\(q\)代入公式\ref{lrt_rtsl}, 最终回归直线的函数为:
\[ \begin{equation} y = 0.41x - 12.06 \end{equation} \label{lrt_ectedfc} \]模型参数的个数
模型的参数个数大于数据规模,参数就不确定的。所以数据必须大于参数的个数。
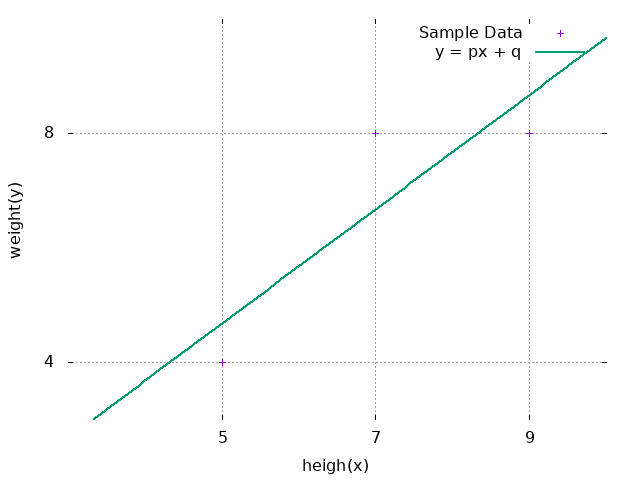
习题
收集样本:
| 数学成绩x | 理科成绩y | |
|---|---|---|
| 学生1 | 7 | 8 |
| 学生2 | 5 | 4 |
| 学生3 | 9 | 8 |
算出预期值:
| 数学成绩x | 理科成绩y | 预期值\(px+q\) | 误差\(e=y-(px+q)\) | |
|---|---|---|---|---|
| 学生1 | 7 | 8 | \(7p+q\) | \(8-(7p+q)\) |
| 学生2 | 5 | 4 | \(5p+q\) | \(4-(5p+q)\) |
| 学生3 | 9 | 8 | \(9p+q\) | \(8-(9p+q)\) |
最小二乘法示平方误差:
\[ \begin{split} C_{\rm T} & = \frac{1}{2}\{8 - (7p + q)\}^2 \\ & + \frac{1}{2}\{4 - (5p + q)\}^2 \\ & + \frac{1}{2}\{8 - (9p + q)\}^2 \end{split} \]分别求偏导:
\[ \begin{split} \frac{\partial C_{\rm T}}{\partial p} = 0 = & - 7\{8 - (7p + q)\} \\ & - 5\{4 - (5p + q)\} \\ & - 9\{8 - (9p + q)\} \\ \frac{\partial C_{\rm T}}{\partial q} = 0 = & -\{8 - (7p + q)\} \\ & -\{4 - (5p + q)\} \\ & -\{8 - (9p + q)\} \end{split} \]解联立方程:
\[ \begin{cases} \begin{split} 21p & + 3q & = 20 \\ 155p & + 21q & = 148 \end{split} \end{cases} \]得到:
\[ p = 1 , q = -\frac{1}{3} \]回归直线的函数:
\[ y = x - \frac{1}{3} \]